

中国科学技术大学研发出具有19自由度仿生灵巧手的高科技装置,这一创新成果标志着中国在机器人技术领域取得了重要进展。该装置拥有高度灵活性和逼真度,可模拟人类手指的精细动作,为智能机器人提供了更强大的操作能力。这一技术的突破将极大地推动智能机器人技术在工业、医疗、航空航天等领域的应用和发展。
本文目录导读:
随着科技的飞速发展,人工智能领域的研究日新月异,在机器人技术不断突破的今天,仿生灵巧手作为机器人技术的重要组成部分,其研发和应用显得尤为重要,中国科学技术大学(中国科大)近期在仿生灵巧手领域取得了重大突破,成功研发出具有19自由度仿生灵巧手的高科技装置,这一成果将为机器人技术的发展带来革命性的变革。
背景介绍
仿生灵巧手是机器人技术中的重要组成部分,主要用于模拟人类手指的灵活动作,以实现更为精细的操作,随着材料科学、传感器技术、计算机技术等领域的不断进步,仿生灵巧手的研究和应用逐渐成为热点,中国科大此次研发的具有19自由度仿生灵巧手的高科技装置,是在长期研究积累的基础上取得的重大突破。

研发意义
中国科大此次研发的仿生灵巧手具有极高的自由度,能够实现更为精细、灵活的动作,这一成果的突破,对于机器人技术的发展具有重要意义,高自由度的仿生灵巧手可以提高机器人的操作能力,使机器人在复杂环境下完成更为精细的操作任务,高自由度的仿生灵巧手可以拓宽机器人的应用领域,例如在医疗、航空航天、精密制造等领域发挥重要作用,高自由度的仿生灵巧手也是人工智能领域的重要研究方向,对于推动人工智能技术的发展具有重要意义。
研发过程
中国科大此次研发的仿生灵巧手是在长期研究积累的基础上取得的突破,研发过程中,科研人员采用了先进的材料科学、传感器技术、计算机技术等,实现了仿生灵巧手的高精度、高灵敏度、高稳定性等特点,科研人员还针对仿生灵巧手的控制算法进行了深入研究,实现了仿生灵巧手的精准控制,整个研发过程充满了挑战,科研人员克服了诸多困难,最终取得了成功。
技术特点
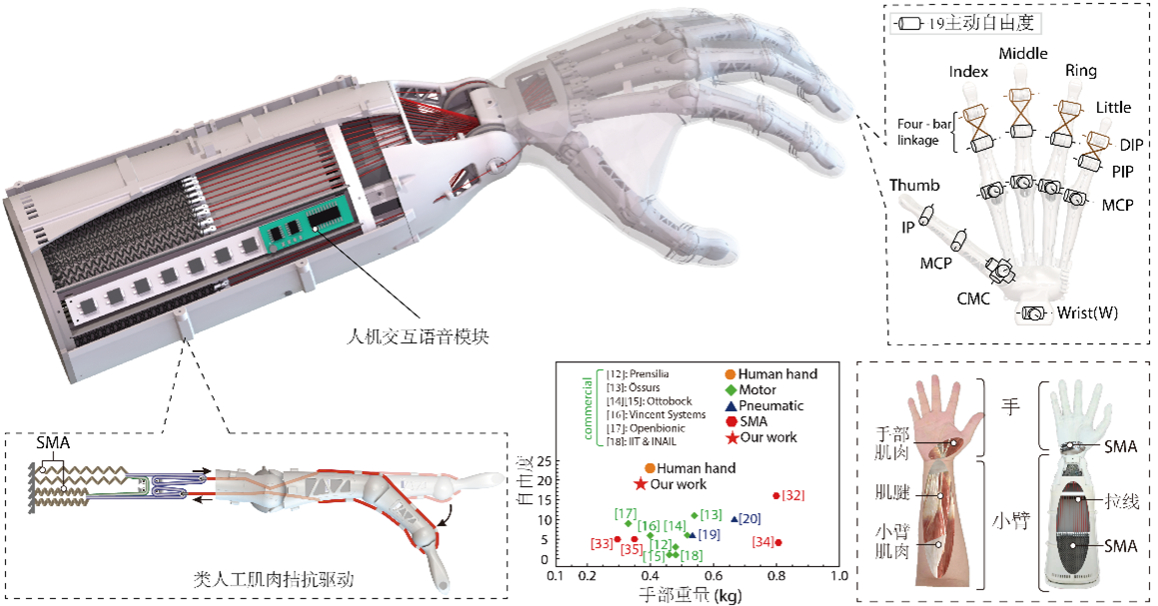
中国科大此次研发的仿生灵巧手具有多项技术特点,该仿生灵巧手具有高达19个自由度,能够实现极为精细、灵活的动作,该仿生灵巧手采用了先进的材料科学,实现了装置的高强度、高耐磨性等特点,该仿生灵巧手还采用了先进的传感器技术,能够实现精确的力度感知和动作控制,该仿生灵巧手的控制算法也具有较高的智能化程度,能够实现自主控制和学习。
应用领域
中国科大此次研发的仿生灵巧手具有广泛的应用领域,该仿生灵巧手可以应用于医疗领域,实现精细的手术操作等任务,该仿生灵巧手可以应用于航空航天领域,实现卫星组装、太空探索等任务,该仿生灵巧手还可以应用于精密制造、文物修复等领域,该仿生灵巧手的应用领域十分广泛,具有广阔的市场前景。
未来展望
中国科大此次研发的仿生灵巧手为未来机器人技术的发展开辟了新的道路,随着人工智能技术的不断发展,仿生灵巧手将会在更多领域得到应用,随着材料科学、传感器技术、计算机技术等领域的不断进步,仿生灵巧手的技术水平将会不断提高,相信在不久的将来,仿生灵巧手将会实现更为广泛的应用,为人类带来更多的便利和福祉。
中国科大此次研发的具有19自由度仿生灵巧手的高科技装置,是机器人技术领域的一次重大突破,这一成果的取得,不仅提高了机器人的操作能力,拓宽了机器人的应用领域,也为未来机器人技术的发展开辟了新的道路。
 京ICP备11000001号
京ICP备11000001号