

春晚舞台上出现机器人表演,但机器人的脚步显得不太稳定,出现直哆嗦的情况。尽管技术不断进步,机器人的表演仍然存在一定的局限性。此次表演中的机器人脚步问题可能是程序设计或机械结构方面的问题,需要进一步完善和改进。不过,机器人的参与也为春晚舞台带来了新颖的元素和观众的新鲜感。摘要字数控制在100-200字左右。
本文目录导读:
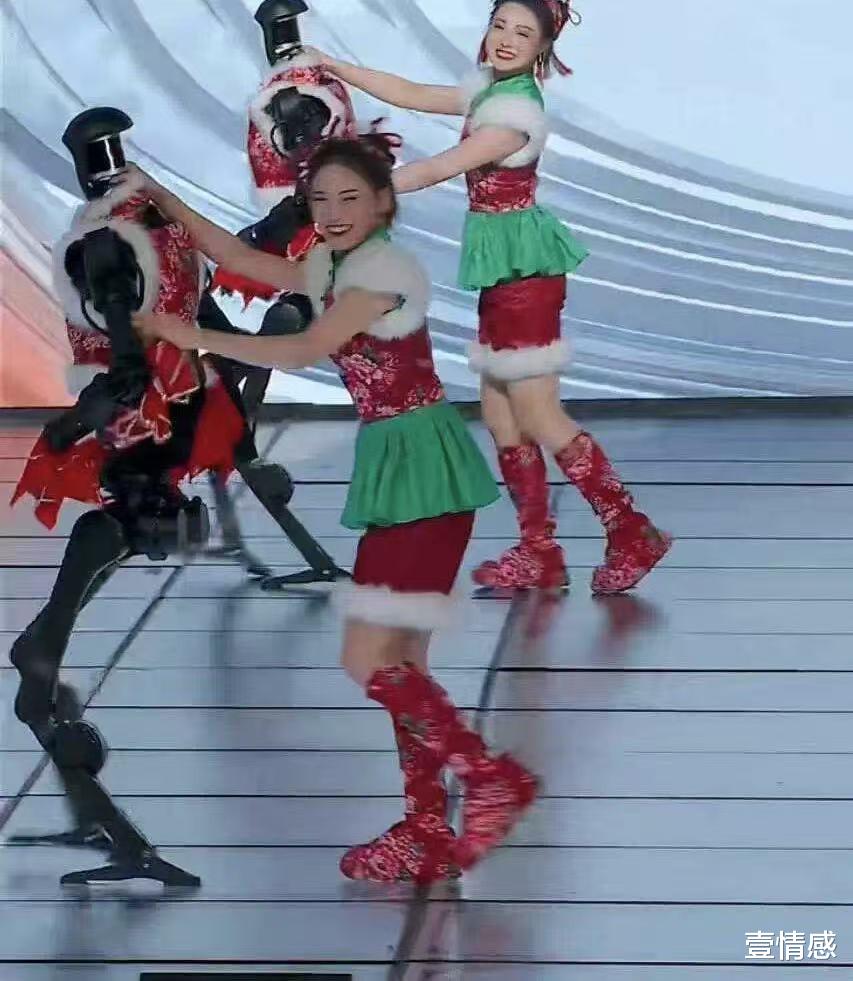
随着科技的飞速发展,人工智能逐渐融入人们的日常生活,春节晚会作为中国传统文化的重要组成部分,也不断尝试创新,引入机器人等元素,为观众带来全新的视听体验,在机器人参与春晚的过程中,有时会出现一些令人啼笑皆非的场面,比如机器人下场时脚步直哆嗦的情况,本文将从多个角度探讨这一现象,并深入分析其背后的原因。
春晚机器人的发展历程
自人工智能诞生以来,机器人技术不断进步,越来越多的机器人开始走进人们的视野,近年来,随着春节晚会的不断创新,机器人也逐渐成为春晚舞台上的一道亮丽风景线,从最初的简单机械动作到如今的智能互动,春晚机器人见证了人工智能技术的飞速发展,在这个过程中,机器人下场时脚步直哆嗦的情况时有发生,成为了观众关注的焦点。
机器人下场时脚步直哆嗦的现象
在春晚舞台上,机器人表演的过程中有时会出现脚步不稳、直哆嗦的情况,这一现象可能与机器人的硬件、软件以及操作等方面有关,机器人的硬件可能存在一定的局限性,如机械结构、传感器等部件的性能不足,导致机器人在运动过程中产生不稳定现象,软件算法的不完善也可能导致机器人运动过程中出现误差,操作人员的技能水平、舞台环境等因素也可能对机器人的表现产生影响。
原因分析
针对机器人下场时脚步直哆嗦的现象,我们可以从以下几个方面进行分析:
1、技术限制:目前,虽然人工智能技术在不断进步,但仍然存在许多技术挑战,机器人的感知、决策、运动控制等关键技术仍需进一步完善。
2、舞台环境复杂:春晚舞台环境复杂多变,可能存在干扰机器人运动的各种因素,如光线、声音、温度等。
3、调试与操作问题:机器人在表演前的调试以及操作过程中的细节处理对机器人的表现至关重要,如果调试不当或操作失误,可能导致机器人在表演过程中出现不稳定现象。
4、机器人适应性不足:每个机器人的性能、特点各不相同,部分机器人在面对复杂环境或高强度表演时可能表现出适应性不足的问题。

应对策略
针对机器人下场时脚步直哆嗦的问题,我们可以从以下几个方面提出应对策略:
1、技术创新:继续加大人工智能技术的研发力度,提高机器人的感知、决策、运动控制等关键技术水平。
2、优化舞台环境:为机器人表演创造更加稳定的舞台环境,减少干扰因素对其表现的影响。
3、加强调试与操作:在机器人表演前进行充分的调试,确保机器人的性能达到最佳状态,提高操作人员的技能水平,确保表演过程中的细节处理得当。

4、提高机器人适应性:针对不同机器人的性能特点,进行有针对性的训练和优化,提高其适应复杂环境和高强度表演的能力。
春晚机器人下场时脚步直哆嗦的现象虽然令人关注,但也反映了人工智能技术在发展过程中面临的挑战,我们应该正视这些问题,通过技术创新、优化舞台环境、加强调试与操作以及提高机器人适应性等策略,不断完善人工智能技术,让机器人在春晚舞台上展现出更加出色的表现,我们也应该保持对新兴技术的关注和热爱,期待人工智能技术在未来为我们带来更多惊喜和便利。
 京ICP备11000001号
京ICP备11000001号