
摘要:本文探讨了马斯克提出的纯视觉方案与激光雷达方案,分析了两者在算力与门槛方面的挑战以及未来融合的可能性。纯视觉方案依赖于强大的计算能力和算法优化,而激光雷达方案则提供更精确的感知能力。随着技术的发展,两者融合的可能性逐渐增大,以实现更高效的自动驾驶系统。
本文目录导读:
随着自动驾驶技术的飞速发展,行业巨头如特斯拉的领导者马斯克正面临着两大方案的抉择:纯视觉方案和激光雷达方案,这两种方案各有优劣,其中纯视觉方案对算力要求高、门槛高,而激光雷达方案暂时成本稍高但门槛相对较低,未来的终极方案是否可能是二者的结合呢?本文将就此展开讨论。
马斯克的纯视觉方案:算力与技术的双重挑战
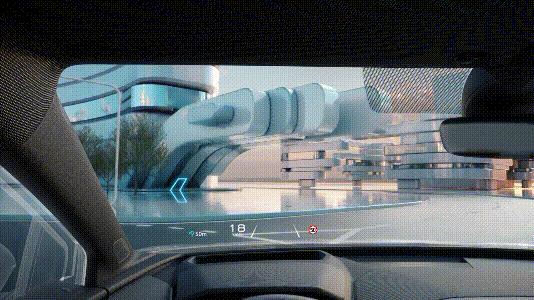
马斯克的纯视觉方案主要依赖于高性能的神经网络和算法,通过大量的图像数据对车辆进行训练,使其能够识别路况、障碍物等信息,这种方案的优点在于其强大的感知能力和灵活性,能够适应各种复杂的环境变化,这种方案的实现需要极高的算力支持,对硬件设备的性能要求极高,纯视觉方案的研发门槛也相对较高,需要强大的技术实力和研发经验。
激光雷达方案的成本与门槛考量
相比之下,激光雷达方案则是一种相对成熟的自动驾驶感知方案,它通过发射激光束,获取车辆周围环境的精确三维数据,从而实现车辆的精准定位和环境感知,虽然激光雷达方案的初始成本相对较高,但随着技术的普及和规模化生产,其成本有望逐渐降低,激光雷达方案的门槛相对较低,对于技术实力和研发经验的积累要求相对较低。
两种方案的比较与未来趋势分析
纯视觉方案和激光雷达方案各有优劣,那么未来的终极方案是否可能是二者的结合呢?这个问题值得我们深入探讨,从技术进步的角度来看,纯视觉方案和激光雷达方案的技术发展是相互促进的,随着神经网络和算法的不断优化,纯视觉方案的感知能力将得到进一步提升,随着激光雷达技术的不断发展,其性能也将得到进一步提升,二者的结合有可能实现优势互补,提高自动驾驶的感知能力和适应性。
从成本和市场接受度的角度来看,未来的自动驾驶方案需要兼顾成本和性能,虽然激光雷达的初始成本较高,但随着技术的普及和规模化生产,其成本有望逐步降低,而纯视觉方案虽然具有潜力,但仍需要更高的算力支持和高技术门槛,二者的结合有可能在降低成本的同时,提高自动驾驶的性能和适应性。
未来的自动驾驶方案还需要考虑法规和政策的影响,目前,各国政府对于自动驾驶的法规和政策尚未完善,这也为两种方案的融合提供了可能性,随着法规的完善和政策的引导,纯视觉方案和激光雷达方案的结合可能成为一种主流的自动驾驶方案。

马斯克的纯视觉方案和激光雷达方案各有优劣,未来的终极方案可能是二者的结合,这种结合有可能实现优势互补,提高自动驾驶的感知能力、适应性和成本效益,这需要我们继续深入研究和探索,以实现自动驾驶技术的持续发展和突破。
 京ICP备11000001号
京ICP备11000001号